
26 05 2026 | Innovation et technologique
Mentre gran parte del settore della logistica aerea punta su velivoli e droni sempre più veloci, pesanti e capaci di coprire distanze enormi con carichi massicci, c’è chi ha deciso di invertire totalmente la rotta con un progetto davvero fuori dal comune. La...

26 05 2026 | Innovation et technologique
Unmanned aerial vehicle (UAV) identification in edge environments requires both high classification accuracy and efficient real-time deployment on lightweight hardware. This study presents LUMEN, a Lightweight UAV Multi-Enhanced Network designed for...
26 05 2026 | Innovation et technologique
Wireless resource allocation in digital-twin-enabled unmanned aerial vehicle (UAV) swarms must be both network-feasible and certifiably safe for closed-loop control. Existing packet-level or scalar-priority schedulers cannot meaningfully compare heterogeneous...
26 05 2026 | Innovation et technologique
UAV path planning in complex three-dimensional obstacle environments requires a balance between search efficiency and flight feasibility. However, existing RRT*-based methods often fail to satisfy this requirement, as their random sampling lacks directional guidance...
26 05 2026 | Innovation et technologique
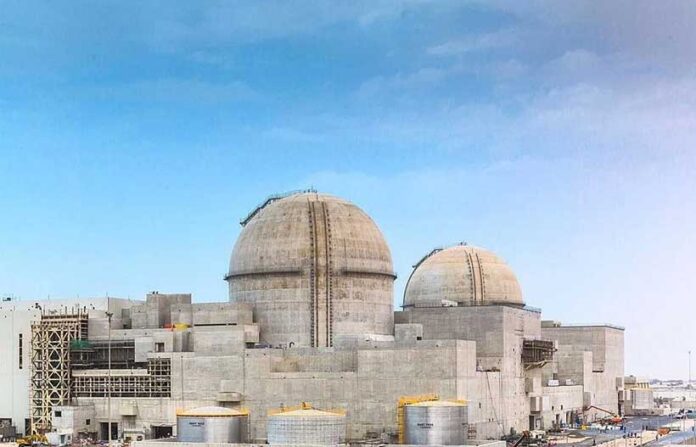
A drone strike at the Barakah Nuclear Power Plant in the UAE caused a fire but did not affect safety or operations, according to Abu Dhabi officials. They did not assign blame for the attack, which comes amid stalled efforts to end the U. S.-Israeli war with Iran. The...
26 05 2026 | Innovation et technologique
Highlights What are the main findings? A DMPC-SQP-based cooperative tracking framework for UAV swarm is proposed. In dense threat environments, it achieves a 93.4% QP feasibility rate and reduces the mean tracking error by 25.4% compared to fixed-altitude DMPC and by...
